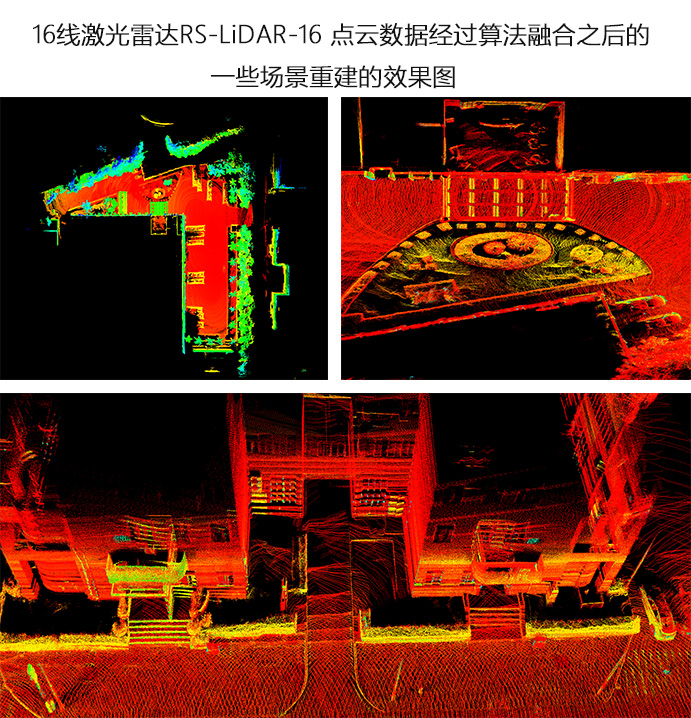
RS-LiDAR-16通过16个激光头同时发射高频率激光束对外界环境进行持续性的扫描,经过高速数字信号处理技术和测距算法提供三维空间点云数据及物体反射率,可以让机器看到周围的世界,为定位、导航、避障等提供有力的保障。
主要面向自动驾驶汽车环境感知、机器人环境感知、无人机测绘等领域。
产品特点:
水平 360 度视角
每秒 5-20 转的旋转速率( 可调节)
垂直 30 度视角
远达 150 米的回波距离( 距离长短根据实际需要进行调节)
| 线数 |
16 |
| 激光波长 |
905nm |
| 激光安全等级 |
Class 1 人眼安全 |
| 测距能力 |
150m(80m@10% NIST) |
| 盲区 |
≤0.4m |
| 精度(典型值) |
Up to ±2cm |
| 水平视场角 |
360° |
| 垂直视场角 |
30° |
| 水平角分辨率 |
0.1°/0.2°/0.4° |
| 垂直角分辨率 |
2° |
| 帧率 |
5Hz/10Hz/20Hz |
| 转速 |
300/600/1200rpm(5/10/20Hz) |
| 出点数 |
~300,000pts/s(单回波模式)
~600,000pts/s(双回波模式) |
| 以太网输出 |
100Mbps |
| 输出数据协议 |
UDP packets over Ethernet |
| UDP数据包内容 |
三维空间坐标、反射强度、时间戳等 |
| 工作电压 |
9V - 32V |
| 产品功率 |
12W |
| 重量(不包含数据线) |
~0.87 kg |
| 尺寸 |
φ109mm * H80.7 mm |
| 工作温度 |
-30°C ~ +60°C |
| 存储温度 |
-40°C~ +85°C |
| 防护等级 |
IP67 |
无人驾驶汽车、无人机、机器人自主导航避障、地图重建、地理测绘等。
